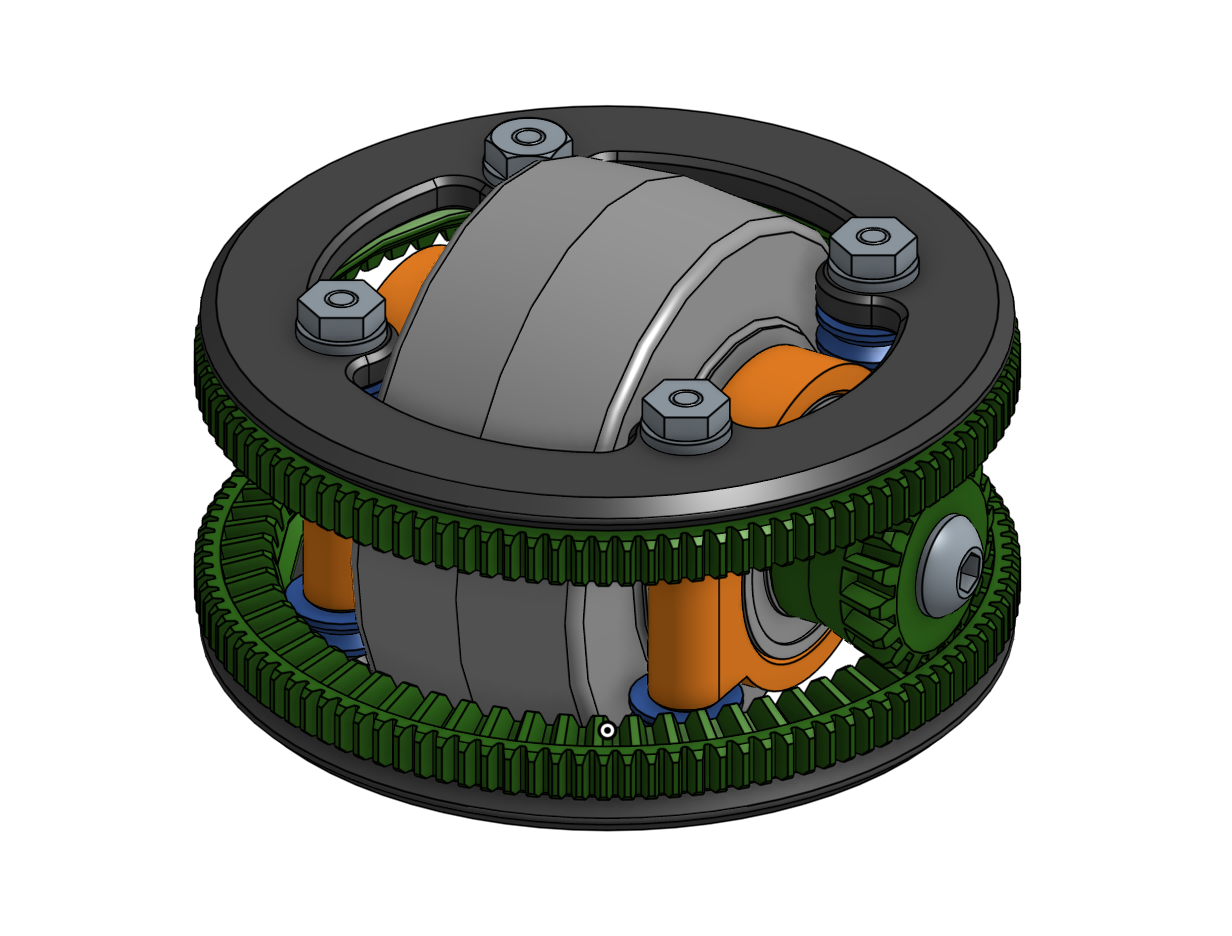
Utilizes differential mechanism to dynamically allocate power between azimuth and drive for a technically superior swerve drive.
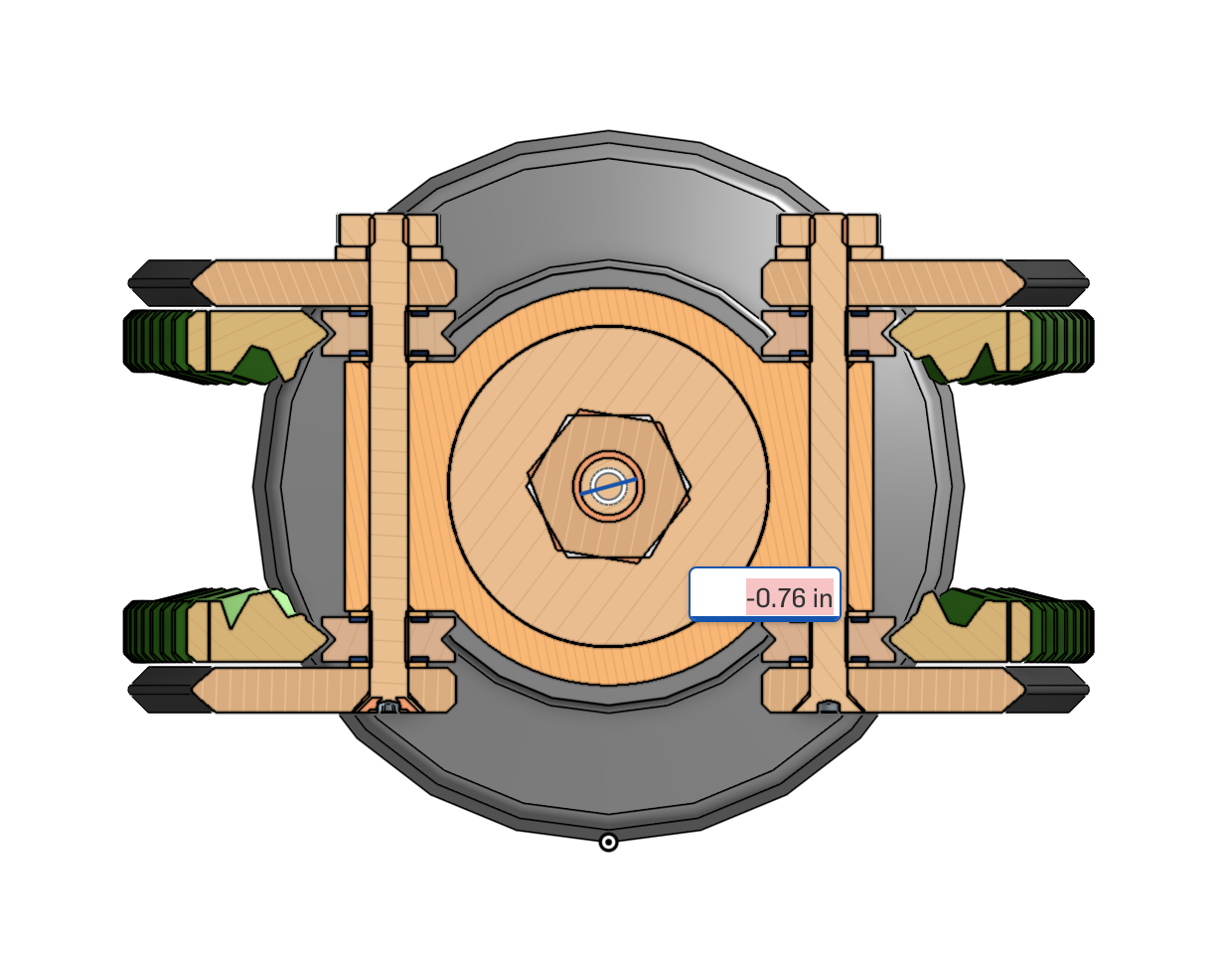
Here is a section view that helps show the construction:
This design has been downloaded by over 100 people and counting from my GrabCAD.
In the future, I plan to build a drivebase using these modules, using ROS for control and potentially simulate a digital twin for advanced sensing and navigation.